2019 Felix Nölte
Ein Exoskelett für haptisches Feedback im virtuellen Raum – Konstruktion und Evaluation eines Handschuhs mit haptischem Feedback
Tags
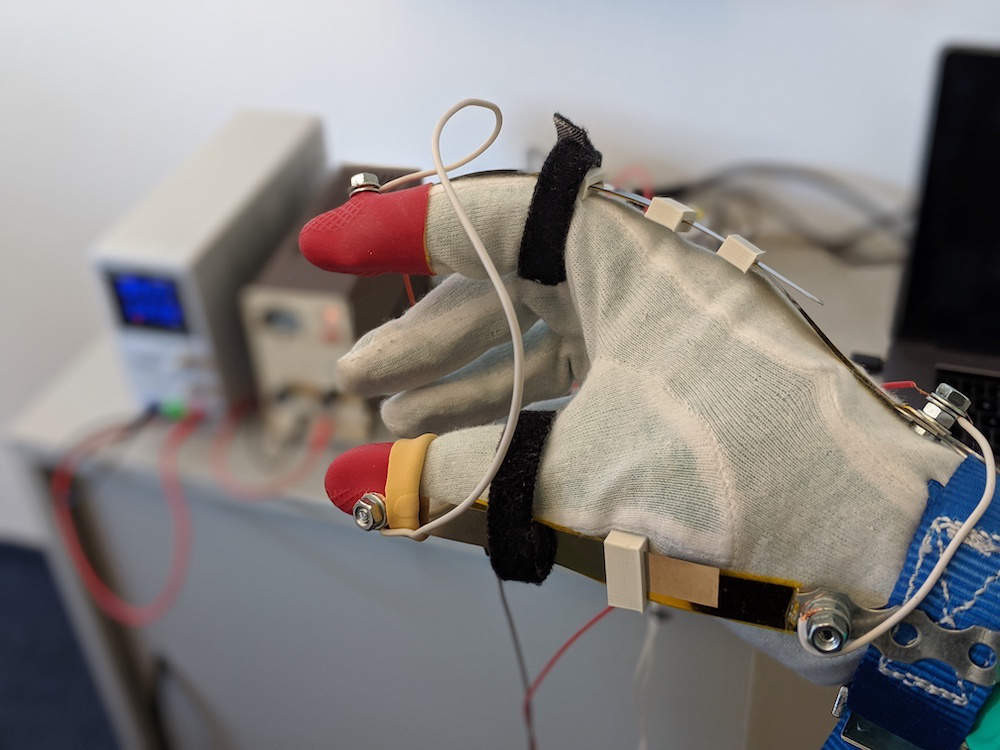
In dieser Arbeit wurde ein Exoskelett für haptisches Feedback an einem Handschuh im virtuellen Raum konstruiert. Vorlage war das Projekt „dextrES“ der ETH Zürich.
Für die dabei verwendete elektrostatisch-adhäsive Bremse wurde zuerst die benötigte Hochspannungs-Wechselstromquelle gebaut und anschliessend der Handschuh konstruiert. Zur Steuerung kam ein Arduino zum Einsatz, der auf Computer-Seite mit einer Processing-Anwendung kommuniziert.
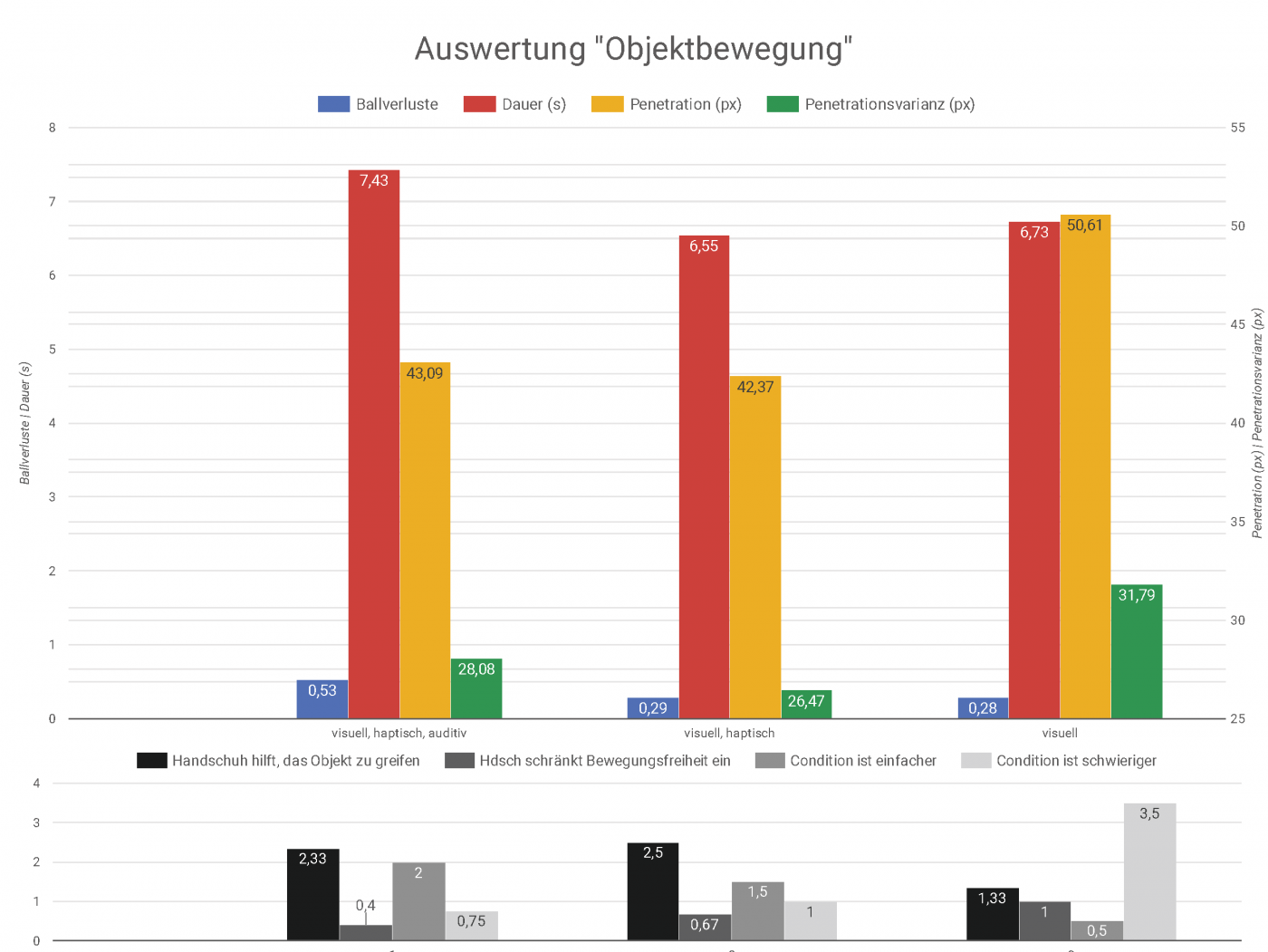
Der Handschuh wurde in einer Nutzerstudie hinsichtlich seiner Fähigkeiten getestet und erwies sich als unterstützend, Objekte im virtuellen Raum präziser zu greifen. Das haptische Feedback hilft, beim Greifen den Abstand der greifenden Finger zueinander zu halten, indem es der Bewegung einen Widerstand entgegen setzt.
Studiengang
Interaktive Medien (BA)
Betreuung
Prof. Dr. Michael Kipp